
Posts tagged automated vehicles
The future of (public) transport
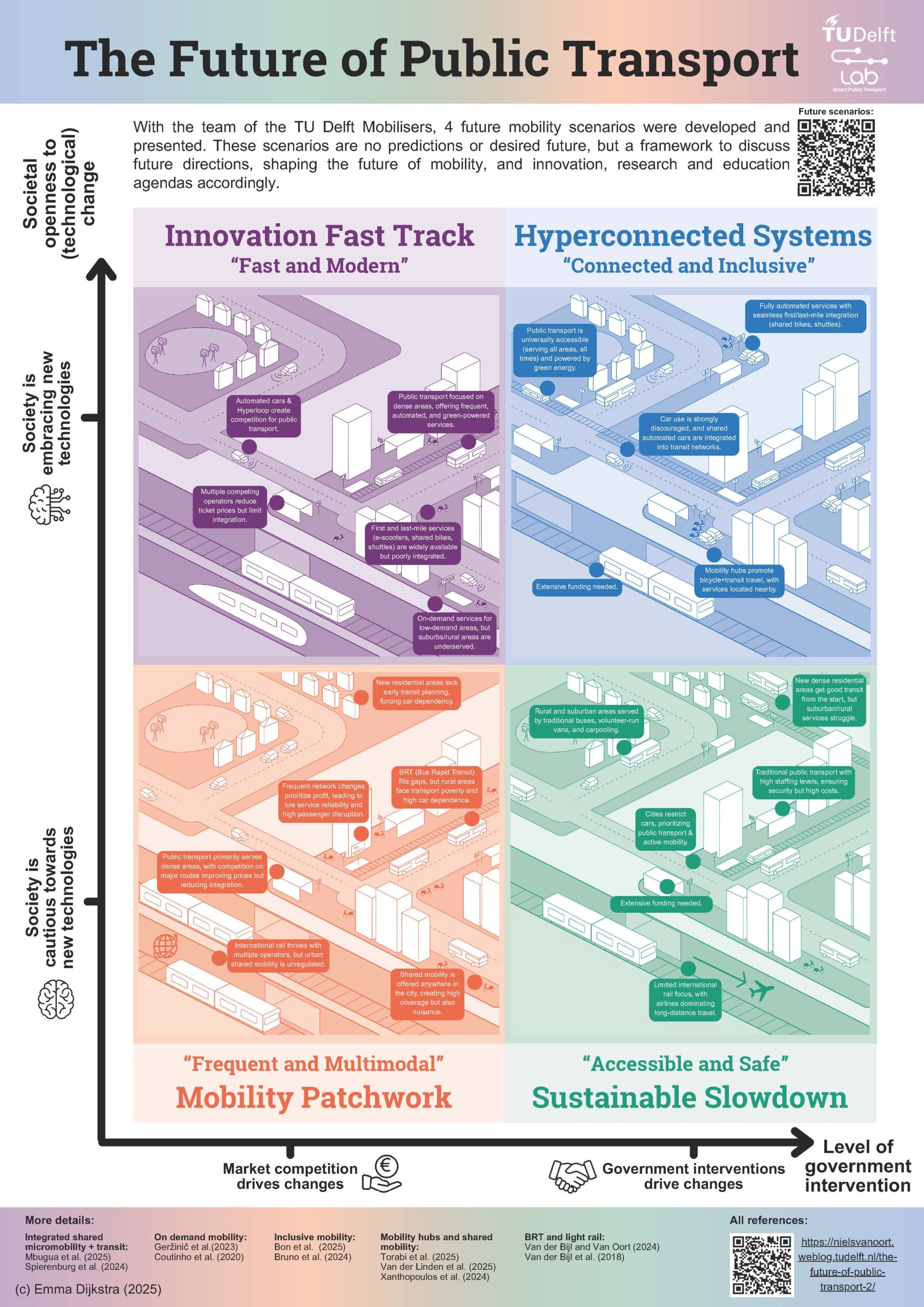
With the team of the TU Delft Mobilisers, we developed 4 future mobility scenarios. These scenarios are no predictions or desired future, but a framework to discuss future directions, shaping the future of mobility, and innovation, research and education agendas accordingly. Find the report HERE.
In addition to the general scenario description, the 12 Mobilisers, from 6 faculties, also wrote perspectives on their own domains. Read my perspectives on public transport and shared mobility HERE or in the infographic. Sources are accessible via the links below the figure.
Relevant research papers/books:
Integrated shared micromobility+transit
Mbugua, W., D. Duives, J.A. Annema, N. van Oort (2025), Societal costs and benefits analysis of integrating bike-sharing systems with public transport: A case study of the public transport bike (‘OV-fiets’) in the Netherlands, Case studies on transport policy.
Spierenburg, L., H. van Lint, N. van Oort (2024), Synergizing cycling and transit: Strategic placement of cycling infrastructure to enhance job accessibility, Journal of Transport Geography, Volume 116.
On demand mobility
Geržinič, N., O. Cats, N. van Oort, S. Hoogendoorn-Lanser & S.P Hoogendoorn (2023) What is the market potential for on-demand services as a train station access mode?, Transportmetrica A: Transport Science.
Coutinho, F.M., van Oort, N., Christoforou, Z., Alonso-González, M.J., Cats, O., Hoogendoorn, S.(2020), Impacts of replacing a fixed public transport line by a demand responsive transport system: Case study of a rural area in Amsterdam, Research in Transportation Economics, art. no. 100910.
Inclusive mobility
Bon, T., M. Bruno, N. van Oort (2025), Three-dimensional transport poverty and its socio-demographic and urban density predictors: Spatial regression analyses of neighborhoods in the Amsterdam metropolitan area, Transportation Research Interdisciplinary Perspectives, Volume 29.
Bruno, M., Kouwenberg, M., & van Oort, N. (2024). Evaluating How Transportation Policy Addresses Transport Related Social Exclusion: A Novel Method Applied to the Amsterdam Transport Region. Transportation Research Interdisciplinary Perspectives, Volume 26
Mobility hubs and shared mobility
Torabi, F., Y. Araghi, N. van Oort, S.P. Hoogendoorn (2025), A latent class approach to explore shared mobility among older people in Midsized Dutch inner cities, Transportation Research Interdisciplinary Perspectives, Volume 33.
Van der Linden, H., G. Correia, N. van Oort, S. Koster, M. Legêne, M. Kroesen (2025), Driving factors behind station-based car sharing adoption: Discovering distinct user profiles through a latent class cluster analysis, Transport Policy, Volume 162, P. 232-241.
Xanthopoulos, S., M. van der Tuin, S. Sharif Azadeh, G. Correia, N. van Oort, M. Snelder (2024), Optimization of the location and capacity of shared multimodal mobility hubs to maximize travel utility in urban areas, Transportation Research Part A: Policy and Practice, Volume 179.
BRT and light rail
Van der Bijl, R. and N. van Oort (2024), Betere Bus, Acquire Publishing
Van der Bijl, R., N. van Oort, B. Bukman (2018), Light Rail Transit Systems: 61 Lessons in Sustainable Urban Development, Elsevier.
Find more research (results) related to key concepts that play a role in (some of) these scenarios:
Onderzoeksagenda / Research agenda
In het openbaar vervoer is nog maar weinig bij het oude. Ontwikkelingen als elektrificatie, automatisering en deelmobiliteit hebben hun impact op vraag én
aanbod. Behalve vlot en veilig moet het ov ook groen en inclusief zijn. En dan is er de nog altijd voelbare impact van covid-19. Om op dit speelveld de juiste keuzes te maken, heeft het ov nieuwe inzichten en nieuwe tools nodig. Zie hiervoor mijn (geactualiseerde) Onderzoeksagenda.
The world of public transport is changing rapidly. Developments such as electrification, automation, and shared mobility have had an impact on both demand and supply. Besides being smooth and safe, public transport must now also be green and inclusive. And then there is the still tangible impact of Covid‑19. To make the right choices in this evolving landscape, we need new knowledge and new tools. Find my (updated) Research Agenda.
Podcast Mobility Innovators: Human-centered design for Smart Public Transport
Technology and New mobility are reshaping urban transportation in cities. Human-centric design is key to the quality of life in cities, putting people at the heart of urban transport planning. All stakeholders, including academia, will play a key role to reshape the future of mobility.
Listen to the podcast of Mobility Innovators with Niels van Oort:
04:00 Service reliability in public transport
07:40 About Smart Public Transport Lab at Delft University
14:00 How to run LRT system in the cities efficiently
20:20 Digital Inequality in Transport Services
28:50 Tesla predication on Self Driving Vehicles
34:50 MaaS from the passengers’ perspective
38:30 First & Last miles connectivity
44:54 Use of Big Data to improve services
49:05 Role of academia in the new world
Find more details about the discussed topics here:
Digital inequality (literature review paper)
Service reliability (podcast and papers)
5E model of wider impacts of public transport (book chapter 6, page 112-)
The future of public transport in the era of emerging modes
Due to societal and technological trends and developments, new modes (will) emerge. In this workshop at the Urbanism Next Europe conference, Maaike Snelder (TNO/TU Delft), Maria Alonso-Gonzalez (KiM) and Niels van Oort (TUDelft) shared their research findings about on-demand pooled services, autonomous shuttles and share bicycles and discussed about their contribution to the future of public transport.
Find the presentations, including references, here:
Workshop Future of Public Transport @Forum ISTS
Due to societal and technological trends, our mobility system and patterns might change. New modes are entering (and leaving) the market, while conventional modes are improved. In this workshop we looked to the future of public transport from the perspective of authorities and operators. The city of The Hague and the Dutch railways (NS) shared their visions on the public transport of the future.
Find the general workshop presentation HERE
Find the presentation of Emile Jutten (City of The Hague) on the national and regional vision on public transport HERE and an animation of the vision HERE
Find the presentation of Mark Oldenziel (NS) on the short term innovations and plans of the railways HERE and an animation of the vision HERE
Autonomous vehicles meet Public Transport: the future of automated vehicles in public transport
The technology of automated vehicles is developing rapidly and the vehicles offer a lot of benefits. They claim to be safer, more environmentally friendly and they can provide transport for everyone, including people who currently don’t have access to transportation. The focus seemed to be on the development of automated private vehicles, but the focus seems to shift from private transportation to automated public transportation.
The Netherlands has been pro-active in testing automated vehicles on public roads. This paper gives an overview of the projects and pilots with automated vehicles as public transport in the Netherlands as well as the remaining research questions. Also, preliminary results of passenger related studies regarding expected ridership and perception are discussed in this paper. Information was gathered by performing desk research and conducting interviews with twelve public transport authorities. During these interviews we spoke about threats and opportunities as well as feasibility, visions and knowledge gaps. Subsequently we spoke about what the future of public transport would look like and how we can anticipate on these upcoming technologies. Lastly we asked about (future) pilot locations with automated vehicles. These locations are included on a map of the Netherlands.
In many places in the Netherlands there is or has already been experiments with automated vehicles (3 – 4). These pilots, experiments or demonstrations are often focused on the technical aspects. However, the challenges regarding the deployment of an automated vehicle extends beyond the technical level. The interviewed parties indicate that it is important to focus, with the upcoming pilots, more on the traveler and the position of the vehicle within the existing public transport network. The interviewed parties stress that it is important to think about the long-term implementation.
The current public transport contracts as we know them, will likely change with the arrival of automated vehicles. Concessions are already becoming more flexible and space is created to experiment with new concepts such as automated vehicles. During a concession, it is possible to experiment alongside the established service and a transition path can be mapped out. Tendering an automated shuttle has not (yet) taken place in the Netherlands (5). The public transport authorities are clear about the future: automated vehicles in public transport do not come with a ‘big bang’ but will gradually find their way.
Check the ETC presentation of Reanne Boersma, Arthur Scheltes and Niels van Oort HERE
Automatische voertuigen; kans of een bedreiging voor het OV in Nederland?
Automatische voertuigen staan volop in de belangstelling en de techniek ontwikkelt zich snel. De mogelijkheden lijken rooskleurig; het verminderen van het aantal ongevallen, het bieden van vervoer voor iedereen en het verminderen van de uitstoot. In het beginstadium leek de focus met name te liggen op het ontwikkelen van automatische privé voertuigen, maar inmiddels staat ook automatisch OV volop in de belangstelling.
In Nederland zijn allerlei pilots ontwikkeld met automatische voertuigen/shuttles. Om een beeld te krijgen van de actuele ontwikkelingen, de plannen en de resterende onderzoeksvragen, is onderzoek uitgevoerd op basis van gesprekken met de OV-autoriteiten van Nederland. Tijdens deze gesprekken is gesproken over de kansen en bedreigingen van het Nederlandse OV en hoe zij denken dat automatische voertuigen daaropin kunnen spelen. Tevens is gesproken over de haalbaarheid, visies, risico’s en zijn kennishiaten achterhaald. Ten slotte zijn ook alle (potentiële) pilot locaties in kaart gebracht.
Lees het CVS paper met Reanne Boersma en Arthur Scheltes hier: PAPER en PRESENTATIE
Het verbeteren van de last-mile in een OV reis met automatische voertuigen
De last-mile in een openbaar vervoer (OV) reis is een van de meest hinderlijke gedeelten van een reis per OV. Hierdoor is het OV veelal niet in staat om te kunnen concurreren met de auto. De oorzaak kan deels worden gevonden in het gebrek aan flexibiliteit en de lage snelheden die de veelal conventionele vervoersmiddelen op de last-mile kenmerken. Recente technologische ontwikkelingen maken innovatieve vraaggestuurde vervoersconcepten met zelfrijdende voertuigen mogelijk. Deze zijn onafhankelijk van vaste infrastructuur en zouden ideaal op de last-mile ingezet kunnen worden, om zo het diffuse patroon en lage vervoersvolume efficiënt te bedienen.
Om de vervoerwaarde en de prestatie van een vraaggestuurd vervoersysteem met zelfrijdende voertuigen op de last-mile te bepalen is als case: Station Delft-Zuid – TU Delft gekozen. Bij een vervoerwaarde studie met dergelijke innovatieve techniek wordt verwacht dat psychologische factoren, naast de puur instrumentele aspecten, expliciet een rol spelen in de vervoerwijzekeuze van reizigers. Het meenemen van deze preferenties is daarom van belang, teneinde de vervoerwaarde niet substantieel te over- of onderschatten. In dit paper zijn de uitkomsten van twee onderzoeken gecombineerd, een instrumenteel onderzoek (simulatiemodel + enquête) naar de vervoerwaarde van een systeem van zelfrijdende voertuigen en een stated preference (SP)-experiment om de invloed van diverse psychologische factoren op de vervoerwaarde te bepalen.
De resultaten laten zien dat er een aanzienlijke vervoerwaarde bestaat voor zelfrijdende voertuigen op de last-mile, te weten 57% van de steekproefpopulatie. Met het simulatiemodel zijn diverse ITS maatregelen gesimuleerd, deze maatregelen omvatten wijzigingen in de netwerkstructuur, voertuiggedrag en het reizigersgedrag.
De prestatie van het last-mile systeem, bleek veelal positief beïnvloedt te worden door bovenstaande maatregelen. Effecten werden gemeten in een vergroting van de systeemcapaciteit, een reductie van de gemiddelde wachttijd ofwel van de gemiddelde reistijd. Het parallel toepassen van deze maatregelen realiseert een aantrekkelijkere concurrentiepositie ten opzichte van de conventionele vervoerswijzen. De meest kenmerkende maatregel, het strategisch plaatsen van voertuigen, op locaties voorafgaand aan het ontstaan van vervoersvraag laat een reductie in de gemiddelde wachttijd van 40% zien.
Uit het SP-experiment blijkt dat de attitudes ‘duurzaamheid’ en ‘vertrouwen’ de twee belangrijkste aspecten zijn in de vervoerwijzekeuze, terwijl de in-voertuigtijd niet minder negatief wordt ervaren dan in een door de reiziger gereden carsharing systeem. Dit suggereert dat de gebruikelijk genoemde voordelen van zelfrijdende voertuigen wellicht nog niet worden ervaren door de reiziger van vandaag, en illustreert het belang om hier aandacht aan te schenken voor een succesvolle implementatie van zelfrijdende voertuigen.
Lees het CVS paper HIER
Zie de CVS presentatie HIER